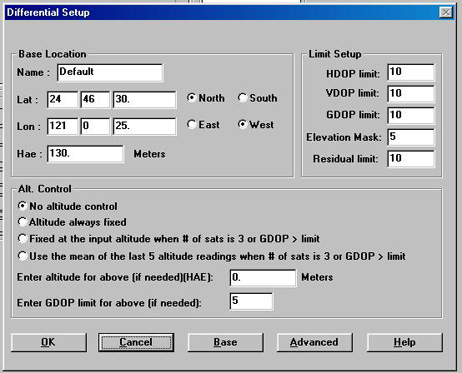
| Q1 What are the fields in the DIFFERENTIAL SETUP dialog box for? | |
A description of the Fields follows:
|
|
| Q1 What are the fields in the DIFFERENTIAL SETUP dialog box for? | |
A description of the Fields follows:
|
|
![]()
| Q2 How do I know what type of ROVER TYPE to select? | |
|
You can determine the type of GPS receiver you are using by looking at the
Version screen on your data collector. The receiver type will be listed
after ENGINE:. MVX = Leica Engine, MOT = Motorola. The
HP-GPS-L4 uses
a Leica MX9000 receiver. |
|
![]()
| Q3 What can cause my data file to fail to differentially correct? | |
There are several factors which can cause differential correction to fail:
|
|
![]()
| Q4 What does the TruobleShooting button do in the Differential Correction Summary screen? | |
| If you have any uncorrected coordinates in your highlighted job, the TroubleShooting button will be active. Pressing this button will open the Error Analysis screen, which will provide explanations for the uncorrected coordinates. Additionally, this screen will allow you to change settings that are relevant to the uncorrected coordinates and run the Differential Correction process again. | |
![]()
| Q5 If differential fails, Can I change my differential setup and run the differential correction process on the same Job again? | |
|
Yes. Each time you differentially correct a file you should change the
name of the Output file, leaving your original file intact. You can correct
a file as many times as necessary to get the desired results. |
|
![]()
| Q6 Can I use a Trimble Pathfinder as a base station to differentially correct my rover files? | |
|
Yes. You need an additional file from Trimble called SSFRNX.EXE (version
8/26/93, 63756 bytes) in your
PC-GPS directory to decode the .SSF file.
Under Base Type in GPS differential select SSF. If your SSF file was collected
in SYNC mode, an additional file is required - SYNC2RAW.EXE (version 11/23/94,
32640 bytes.)
Here are two sites from which to download
these files:
You can also use a Leica Engine, Leica MX9000, Motorola, Ashtech M-XII and
Dimension, Trimble 4000, RINEX and
Winbase®
base data to correct your rover
file.
PC-GPS can use all these
other base types as-is. No additional files are required. |
|
![]()
| Q7 How do I set up my GPS unit as a Base Station? | |
|
For CMT-FIELD 2.5 or 3.7
first select Collect Data from the Main Menu, then press [F3](BASE) and input a file name to bring
up the Base Logging screen. Use the Right and Left arrow keys to
select between BASE and BASE PC mode. Press [F1](START) to start logging, then
[F1](STOP) to stop logging.
The Base mode will store the differential correction file in data drive of your unit. After selecting Base mode, a screen appears showing the memory remaining. When you press [F5](START) the Start Time appears. [F1](STOP) stops the logging of raw data.
BasePC mode uses Kermit as a transfer protocol to store the differential
correction file onto a PC. Connect to your PC just as you would for standard
file transfers. |
|
![]()
| Q8 What is a CORRECTIONS file and how do I create one? | |
| CORRECTION is a CMT file format created by WinBase that can be read by PC-GPS to differentially correct your data. Use a Corrections file to record C/A code correction and ephemeris files in WinBase, then you can correct C/A code jobs using PC-GPS. The file sizes are small and, because the corrections are created by WinBase instead of PC-GPS, the differential correction process will go much faster. The files created will have the extentions .cor and .eph. | |
![]()
| Q9 How far can I be from my base station and still get accurate differential corrections? | |
|
For 1 - 5 m accuracy, you can be up to 300- 500 km away from your base
station. For Carrier Phase differential, you should be within 50-100 km of
your base station. |
|
![]()
| Q10 How do I download the free base station data from NGS? | |
The National Geodetic
Survey (NGS) has a network of base stations across the United States.
They provide their
base station data free of charge to the public. 2. You can also obtain the CORS Rinex data via non-ftp site through the world wide web. Please click the above "base station data" link, or use the following address (case-sensitive): http://www.ngs.noaa.gov/CORS/Data.html You will need to download the "RINEX 2 data" and also the "Global/Broadcast Ephemeris data" (under the non-site specific section) for the day and base station you need. After downloading and unzipping the data, you will see the file extensions: *.04o and *.04n. The file prefixes also need to match. The global ephemeris file has a generic name like: brdcxxx.04n. Please rename the file prefix to match the *.04o file. For example, if the *.04o file is named: fts11230.04o, then rename the brdc1230.02n file to be: fts11230.04n. Now you are ready to differentially correct the data in PC-GPS. Please
note: When using CORS base station data, you do not have to
enter base station coordinates (they are automatically entered by PC-GPS).
If using SSF files, you will need to enter the base coordinates and
select the proper base station to use under the C/A Code differential.
|
|
![]()
| Q11 What is real-time differential correction? | |
|
Real-time differential correction is the process of differentially
correcting your field data as it is collected. The positions that are
stored in the field will already be corrected. |
|
![]()
| Q12 How does real-time differential correction work? | |
|
Base station data is collected at a known point. A correction
information is determined for each satellite based on the data
collected at this point. The information is then broadcast to
a receiver in the field which is connected to your GPS unit.
When the correction information is received, it is applied to the
data currently being collected by the GPS unit. |
|
![]()
| Q13 How can I get real-time differential correction? | |
There are three main sources of real-time correction data:
|
|
![]()
| Q14 Is real-time differential as accurate as post-processing? | |
|
No. Because of time delays built into the system, real-time differential
tends to be slightly less accurate than post-processing. |
|
![]()